px4 仿真环境搭建运行#
- 本文采用 docker 容器搭建 px4 的仿真运行环境
- 容器镜像使用: ubuntu 20.04
- px4 使用版本为:v1.14.2
px4 环境安装#
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
git checkout v1.4.2
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh --no-nuttx
-
报错 :
ERROR: Invalid requirement: 'matplotlib>=3.0.*': .* suffix can only be used with `==` or `!=` operatorsmatplotlib>=3.0.*~~~~~~^ (from line 11 of /root/ws/PX4-Autopilot/Tools/setup/requirements.txt)- 应该是python3 pip版本问题
- 修改文件
Tools/setup/requirements.txt,对应行改成matplotlib>=3.0.0
-
源文档: https://docs.px4.io/v1.14/en/dev_setup/dev_env_linux_ubuntu.html#simulation-and-nuttx-pixhawk-targets
px4 仿真编译启动#
- 报错
.pb.h:12:2: error: #error This file was generated by a newer version of protoc- 原因:容器环境 里之前手动安装过 protobuf ,导致px4 找错 ,重新安装下,可以忽略;
- https://github.com/protocolbuffers/protobuf/blob/v3.6.1.3/src/README.md
/usr/include/gazebo-11/gazebo/msgs/quaternion.pb.h:12:2: error: #error This file was generated by a newer version of protoc which is
12 | #error This file was generated by a newer version of protoc which is
| ^~~~~
/usr/include/gazebo-11/gazebo/msgs/quaternion.pb.h:13:2: error: #error incompatible with your Protocol Buffer headers. Please update
13 | #error incompatible with your Protocol Buffer headers. Please update
| ^~~~~
/usr/include/gazebo-11/gazebo/msgs/quaternion.pb.h:14:2: error: #error your headers.
14 | #error your headers.
| ^~~~~
In file included from /root/ws/PX4-Autopilot/build/px4_sitl_default/build_gazebo-classic/Odometry.pb.h:34,
from /root/ws/PX4-Autopilot/build/px4_sitl_default/build_gazebo-classic/Odometry.pb.cc:4:
/usr/include/gazebo-11/gazebo/msgs/vector3d.pb.h:12:2: error: #error This file was generated by a newer version of protoc which is
12 | #error This file was generated by a newer version of protoc which is
| ^~~~~
/usr/include/gazebo-11/gazebo/msgs/vector3d.pb.h:13:2: error: #error incompatible with your Protocol Buffer headers. Please update
13 | #error incompatible with your Protocol Buffer headers. Please update
| ^~~~~
- 源文档:https://docs.px4.io/v1.14/en/sim_gazebo_gz/gazebo_vehicles.html
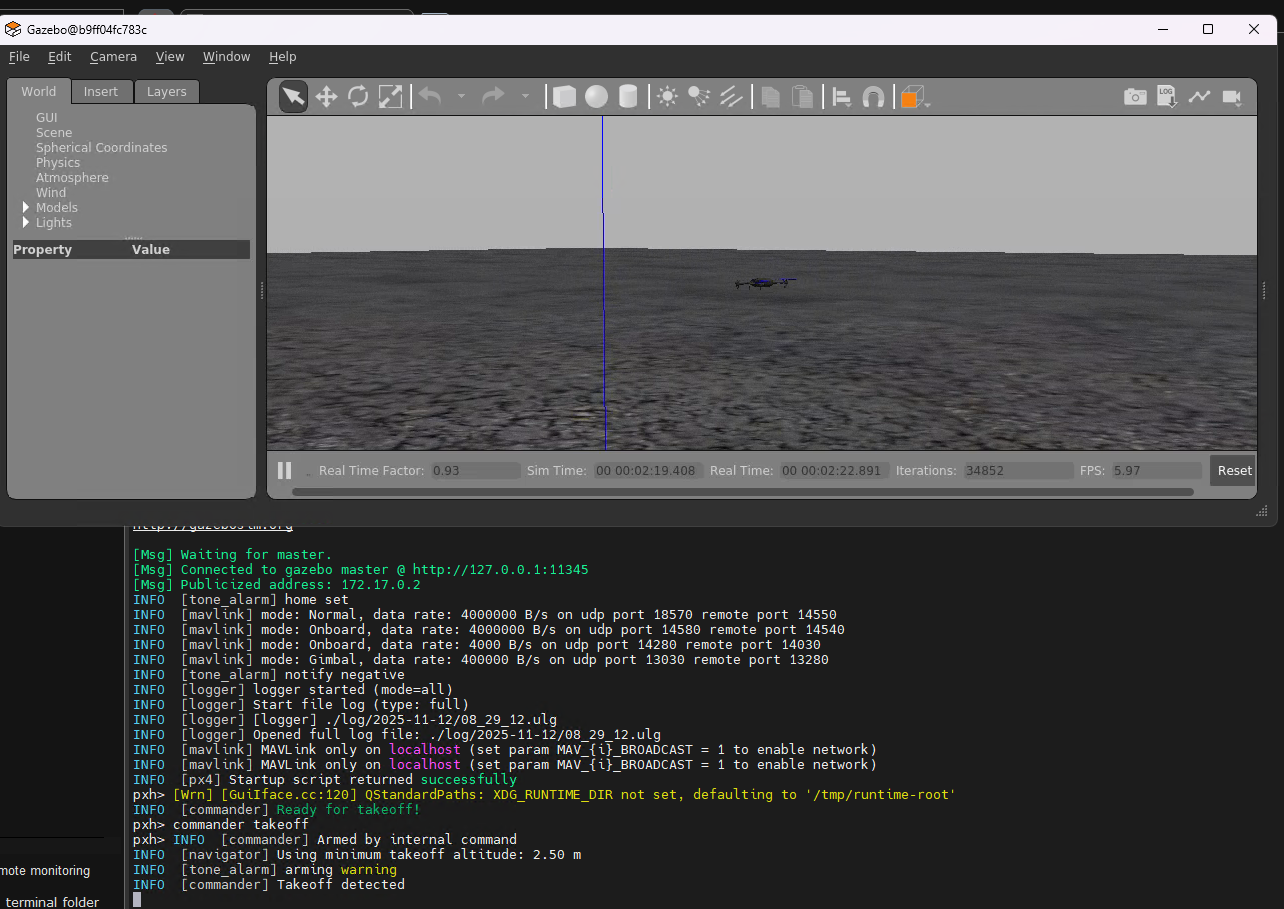
px4 仿真运行#
- 使用 mobaxterm 通过 ssh 连接docker容器,运行如下: